
Systems Approach
to
Robot Navigation and Arena Design
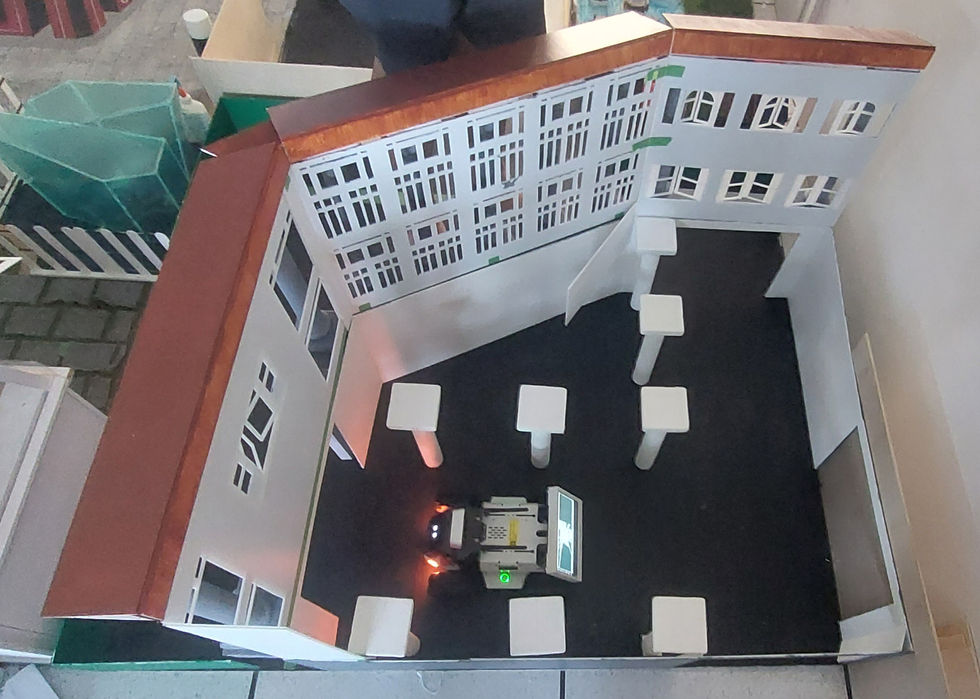
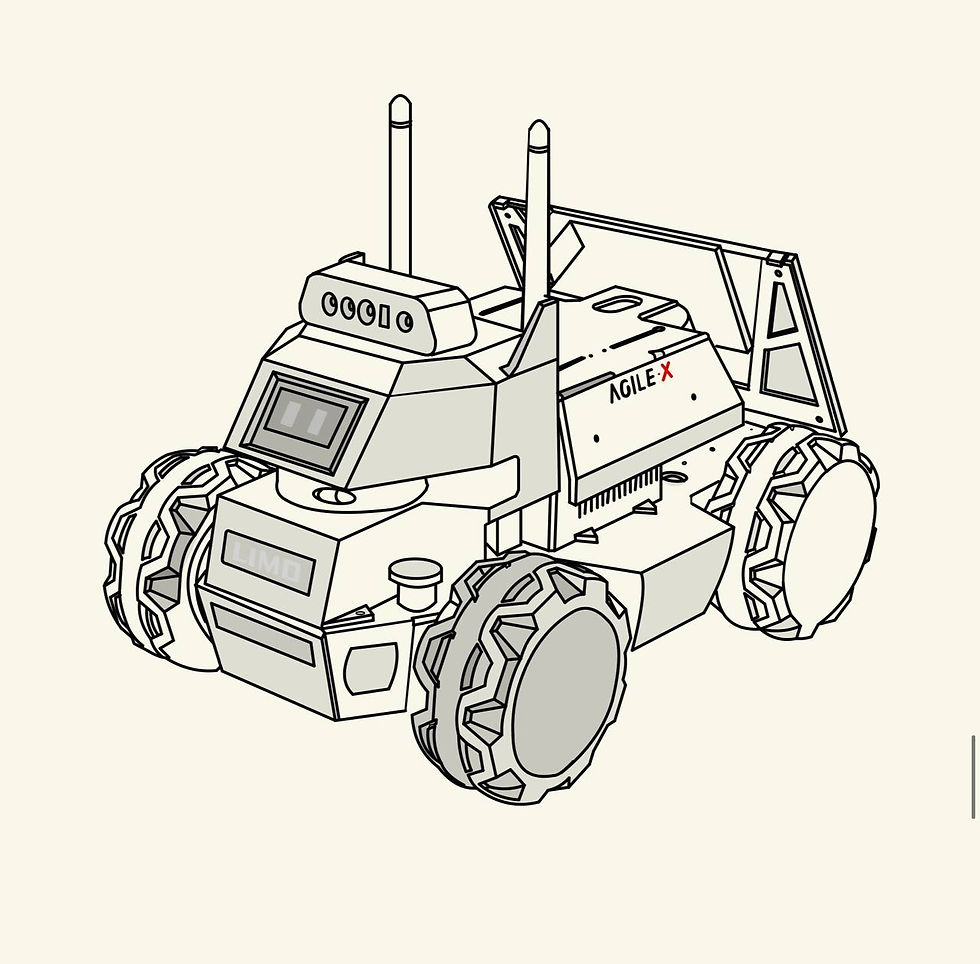
This project involved designing and navigating a complex arena using Agilex LIMO robot. The goal was to create an arena with obstacles to explore and gain experience in a simulated environment, while also successfully navigating our robot through arenas designed by others.
This project provided valuable experience in applying a systems approach, navigation with obstacle detection and project management.
OUR WORK
Systems Engineering Project 1
01
Systems Approach to Engineered Systems
By utilizing a systems engineering approach, we established a project framework, identified core problems, evaluated solutions, and ensured successful integration of robot and arena design. Skills Demonstrated: - Project Planning & Management: Defined project goals, broke down tasks, and managed timeline. - Requirements Analysis: Identified key functionalities and challenges for both arena and robot. - Systems Integration: Ensured seamless interaction between robot functionalities and arena design. - Trade-Off Studies & Evaluation: Compared solution alternatives and selected optimal options.



02
Technical Engineering Skills
We harnessed engineering and programming knowledge to design, implement, and deploy the arena and mobile robot with advanced sensor capabilities. Group Portfolio: https://rsesystemsengineer.wixsite.com/syseng Skills Demonstrated: - Mechanical Design: Utilized CAD software (Solidworks) for arena design. - Manufacturing Techniques: Implemented 3D printing and laser cutting for arena creation. - Robot Programming: Utilized ROS 1 programming to control robot movement and sensor data (lidar and camera). - Sensor Integration: Integrated LIDAR and camera vision for accurate obstacle detection and navigation.